
 , Ce Wang 1, Aiju Shi 3
, Ce Wang 1, Aiju Shi 31 College of Astronautics, Nanjing University of Aeronautics & Astronautics, Nanjing 210016, China
2 Shandong Provincial Key Laboratory of Biosensors, Biology Institute, Qilu University of Technology (Shandong Academy of Sciences), Jinan 250103, China
3 College of Science, Nanjing University of Posts and Telecommunications, Nanjing 210016, China
Abstract
Compared to conventional robots, animals have inherent advantages in terms of flexibility, stability, and the energy supply used for movement. Robo-pigeon has been investigated for several years because of their ideal mobility and carying capacity, but until- now, outdoor studies have not been reported. To develop a robo-pigeon flying outdoors, a miniaturized onboard preprogrammed control module has been developed, and a hierarchical stimulation algorithm proposed to ensure the effectiveness of brain stimulation. The control module consisted of a miniaturized Global Positioning System, a micro-controller, a brain stimulator, and a Secure Digital Memory Card saving a data log. It was capable of the flight control or flight trajectory manipulation of robo-pigeons in long-distance free-flight outdoors. The dimensions of the microsystem are 34 mm
Bio-inspired robots are the subject of intense research and development, in which micro and nano air vehicles (MAVs/NAVs) inspired by bird, insect or bat flight are some of the popular research topics [1-3]. These animals exhibit exceptional mobility and the specialized robots inspired by them are potentially useful for civilian and military purposes [4], for example, the Nano-Hummingbird and the SmartBird. Despite major advances, robots still present significant tradeoffs between endurance, adaptability, stability and maneuverability relative to the animals they mimic [5]. For example, it is reported the Nano-Hummingbird can only fly continuously for eight minutes [6]. The principal limitations are still the energy and power density of existing fuel sources and the complexity of flight dynamics in man-made wing beating flyers [7].
To bypass the bottleneck of the energy problem, a special type of robot, referred to as a robo-animal (or cyborg-animal, biobot), has recently been proposed. Robo-animals employ a living animal as the robot carrier, which solves the problem of energy supply and makes full use of an animal’s mobility. Using knowledge of neuromodulation and techniques of brain computer interface (BCI), different types of robo-animals have been studied in the laboratory, such as mammals [8, 9], fish [10, 11], insects [12-14] and birds [15-18]. These robo-animals can to some extent perform certain movements or maneuvers under manual command. However, with a single exception [8], all have been tested only in a laboratory environment, and it is not clear how well they might work under natural conditions. Outdoor study and validation of robo-animals has become particularly necessary, especially for flying robo-animals.
Using the homing pigeon (Columba livia) as robot- carrier, the robo-pigeon has been thoroughly investigated in a laboratory environment [16, 17] or for a limited flight range [18]. Several nuclei or brain regions and stimulation approaches have been verified for their effectiveness and practicability for neuromodulation of flight control. These provide a solid foundation for further investigation of unlimited flight by robo-pigeons. Here, the first controllable robo-pigeon flying outdoors is reported. A homing pigeon was employed due to its ideal carrying capacity [19] and homing instinct, by which a custom designed control module of 16.8 g could be carried, experimental data logged and accessed following robo-pigeon return. An onboard preprogramed control approach rather, than traditional wireless communication control [20, 21, 22, 23, 24], was proposed for the control module design. This eliminated restrictions of the working radius. A three-level stimulation algorithm was designed to ensure the effectiveness of electrical microstimulation as well as minimize invasion to the bird’s brain. Finally, two robo-pigeons were field tested during 30 km homing flights, with orbiting flight successfully elicited at preprogrammed GPS locations.
A group of homing pigeons (Columba livia) were bred and housed in a loft under a normal day/night light cycle with food and water ad libitum. They were trained by flying around the loft twice a day with a load of 33 g that is heavier than the control module for robo-pigeons (16.8 g, see later detail). The load was normally attached to the pigeon’s back by gluing Velcro straps to the body of the pigeon and then attaching the load to the Velcro. Twenty pigeons, all between 2 and 3 years old, were selected for long-distance homing training twice per week. The robo-pigeon release sites were approximately 30 km from the loft to ensure enough time for testing the hierarchy stimulation algorithm. Pigeons were transported to the release sites in a van in carrier baskets allowing adequate ventilation. Two male pigeons with considerable homing experience, weighing 458 g and 476 g, were chosen from the twenty for the field investigation.
The preparatory surgical operation and electrode implantation was the same as previously reported [17]. Every effort was made to minimize animal suffering and minimize the number of pigeons used. This study was conducted in accordance with the Guide of Laboratory Animal Management Ordinance of China, and was approved by the Jiangsu Association for Laboratory Animal Science (Jiangsu, China).
Two nuclei, the nucleus intercollicularis (ICo) and the formation reticularis medialis mesencephali (FRM), were chosen for the deep brain stimulation (DBS), as they have been proved effective in the laboratory for electrical microstimulation of motion modulation of robo-pigeons under light anesthesia and ground moving [17]. Stimulation of both ICo and FRM reliably evoked motor behavior such as wing flapping and/or lateral body movments that might affect flight trajectory outdoors.
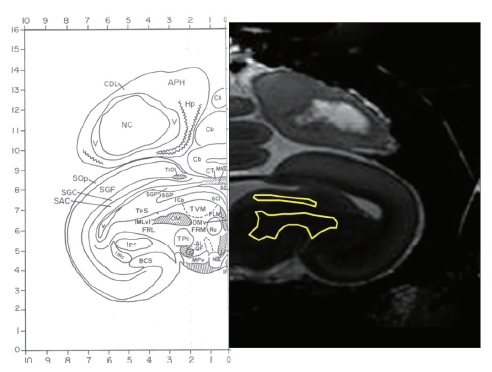
To precisely implant microelectrodes into the ICo or FRM, a standard stereotaxic instrument (type 68001, RWD Life Science, Shenzhen China) integrated with a Revzin adaptor [25] was employed. When fully inserted, the distance between the tips of the ear bars of the adaptor was 10.6 mm and 10.8 mm for the two chosen pigeons. After properly stabilizing the pigeon’s head in the adaptor, reliable stereotaxic coordinates were established following convention [25]. The location of the two stimulation targets are given in Table 1. Fig. 1 illustrates the distribution of ICo and FRM at a 3.50 mm coronal section of by comparing the stereotaxic atlas with a Magnetic Resonance Imageing. A total of eight electrodes were implanted into the ICo or FRM, while only two with reasonable stimulation efficacy (one for each hemisphere) were chosen for the final outdoor investigation.
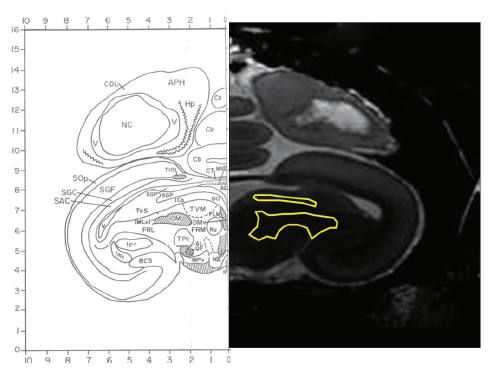 Fig. 1.
Fig. 1.Distribution of ICo and FRM at the coronal section of 3.50 mm. Left panel is cited from the stereotaxic atlas of the pigeon brain [25], while the right panel is a corresponding MRI image. The enclosed area in the MRI image indicates ICo (above) and FRM (below).
A posteriori histochemical analysis is required to check the accurate position of implanted microelectrodes to determine whether the tips have been correctly placed. However, subjects do not survive this procedure. Given the precision the stereotaxic instrument employed for electrode insertion (0.01 mm) and the success rate of electrode implantation in previous studies [17], the posteriori procedure was not conducted in this study. Correct electrode placement was determined by observing the motor behavior elicited by the electrical microstimuli during the implantation procedure. For each half brain of a robo-pigeon, four electrodes were implanted within the range given in Table 1. The best performing electrode was chosen for the outdoor investigation.
| Target | Sagital position (mm) |
Coronal position mm) |
Vertical position (mm) |
|---|---|---|---|
| ICo | 3.00~4.00 | 2.00~3.50 | 6.60~8.00 |
| FRM | 3.00~3.60 | 1.00~2.50 | 4.00~6.50 |
A robo-pigeon is comprised of three components: a well-trained pigeon provides the robot-moving carrier, a miniature light-weight control module, and a sustainable brain machine interface (BMI) that connects the control module to the pigeon’s brain [26]. Typically, users interact with the control module by wireless communication [20-23], that restricts the working radius of robo-animals and interferes with outdoor investigation. To eliminate this restriction, the control module employed for this study was designed to use onboard preprogramming.
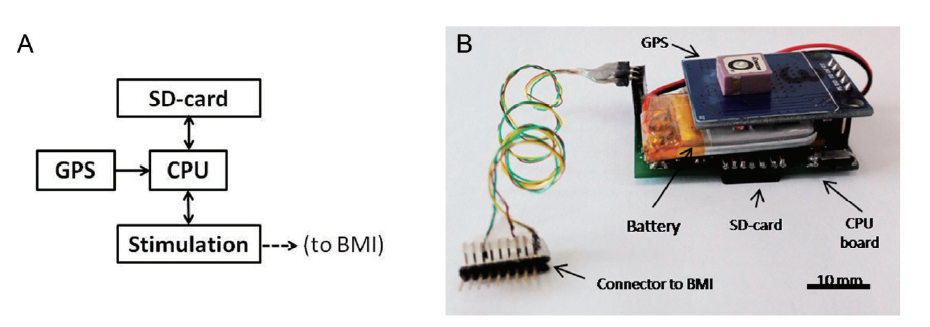
The system architecture of the control module was designed on an embedded computer system based on ARM [27]. It contained four main components Fig. 2.3. The GPS sub-module (ATK-NEO-6M) with a ceramic antenna provided the real-time position and timing updated per second, using signals from satellites. The stimulation sub-module generated brain stimulation signals by means of pulse width modulation (PWM). The micro-SD card storage sub-module logged the GPS signals and the stimulation commands for data post processing. The CPU sub-module (STM32f103rbt6) was used to activate the stimulation sub-module by the preprogrammed control logic (such as given in Fig. 3.1a), making use of the signal from the GPS sub-module.
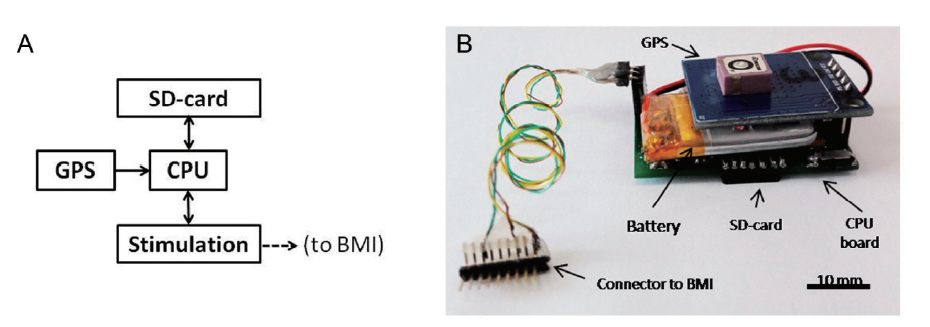 Fig. 2.
Fig. 2.A. The system block diagram of the control module. CPU is the kernel of the system with the preprogrammed code. According to the signal from GPS, CPU judges whether to send stimulation commands to BMI. All these information processed by CPU is logged in SD-card; B. The side photo of the control module. It is in size of 34
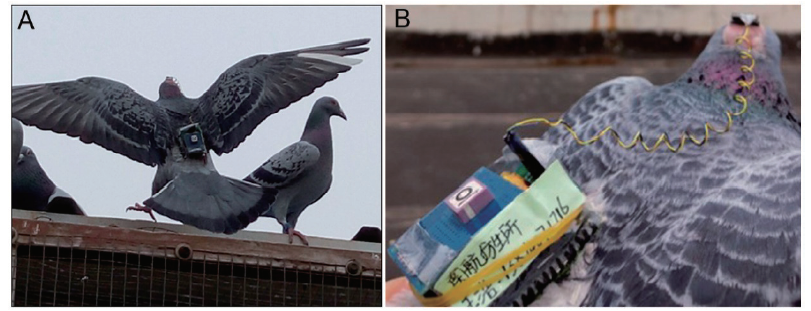 Fig. 3.
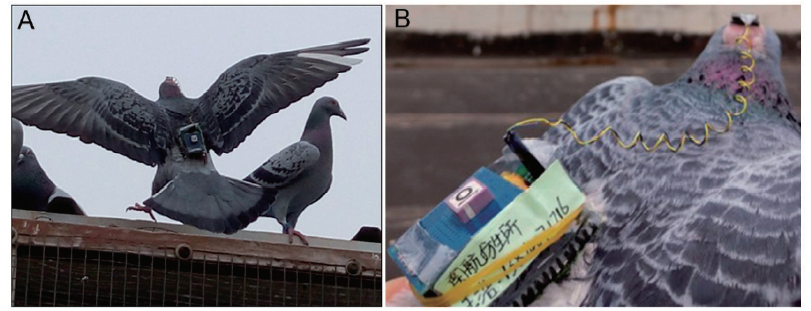
Fig. 3.A. The robo-pigeon is landing on the loft. The pigeons are trained to carry a similar sized and weighted gauge block in daily flight. During experiments, the gauge block is replaced by the control module. B. The close-up view of the control module mounted on the robo-pigeon. The module is connected by loose winding wires to the BMI on the robo-pigeon’s head, by which the stimulation commands are transmitted.
Rectangular biphasic pulses were employed for brain stimulation of the robo-pigeons due to their lower threshold [17] and lack of charge-accumulation [28], that both reduced the risk of injury during electrical stimulation. The hierarchy of three levels of stimulation (single-, periodic- and multi periodic-stimuli) was designed to ensure the effectiveness of the stimulus. Single-stimuli were defined as a one second 80 Hz 3.0 V biphasic square wave pulse train. Periodic-stimuli were as constituted of two successive single-stimuli followed by a two second resting potential of zero volts giving a duration of 4 s. Multi periodic-stimuli comprised 5 groups of periodic-stimuli with total duration of 20 s. This hierarchical approach to stimulation has proved practicable for outdoor investigation (see below).
Fig. 3 shows an example of a robo-pigeon that has landed on the loft. The pigeon, as the robot carrier, was approximately 470 g. The weight of the BMI was 0.42 g [26]. The total mass of the control module, including a rechargeable lithium battery, was 16.8 g, which was much less than the pigeon’s carrying capacity [19]. The dimensions of the control module were 34 mm
| Robopigeon | Half brain | Sagital position(mm) |
Coronal position (mm) |
Vertical position (mm) |
|---|---|---|---|---|
| # 1 | Right | 3.50 | 2.50 | 7.00 |
| Left | 3.50 | 3.00 | 7.20 | |
| # 2 | Right | 3.00 | 3.00 | 7.50 |
| Left | 3.50 | 2.50 | 7.20 |
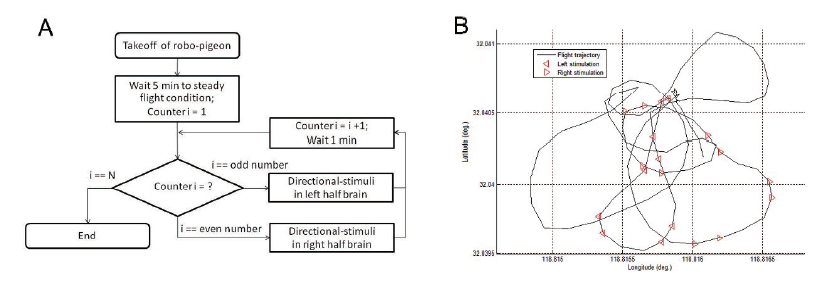
The two robo-pigeons flying with simple control logic (Fig. 3.1a) were piloted around their loft to estimate the efficiency of stimulation. Whether stimulation had the desired effect was determined by the variation in flight direction at two successive sampling points before and after stimulation. For each robo-pigeon, two half brains and a total of 10 sequences of multi periodic-stimuli (thus, 50 periodic-stimuli and 100 single-stimuli) were tested. Fig. 3.1b gives one recording example, which shows the robo-pigeon’s orbiting flight trajectory was coincident with the brain stimulation control at the scale of multi periodic-stimuli. The left stimulation was applied to the target in the left half brain, which was expected to elicit a left turn; while the right stimulation was applied to the target in the right half brain, which was expected to elicit a right turn. The success ratios of the deep brain stimulation are given in Table 3.
| Robopigeon | Half brain | Singlestimuli(n = 50) | Periodicstimuli(n = 25) |
Multi periodicstimuli(n = 5) |
|---|---|---|---|---|
| # 1 | Right | 78% | 88% | 100% |
| Left | 76% | 84% | 80% | |
| # 2 | Right | 72% | 92% | 100% |
| Left | 76% | 88% | 100% |
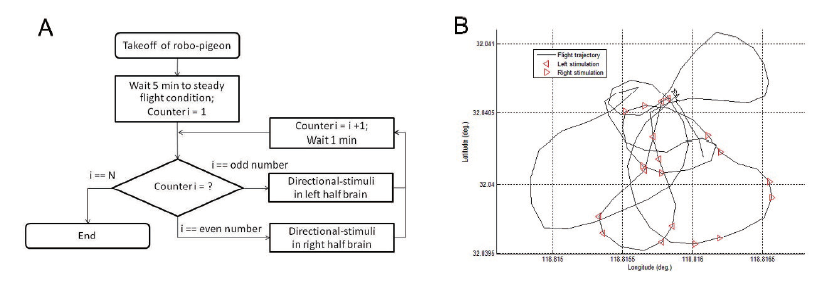 Fig. 4.
Fig. 4.A. Simple control logic for robo-pigeons flying around loft. After takeoff of a robo-pigeon, the control module waits 5 minutes to make sure the pigeon flying under stable conditions, and then generates the directional-stimuli alternatively by a specified number of times to test the stimulation efficiency. B. One example of flight trajectory under this control logic. GPS sampling frequency was 1 Hz, and the flight direction was indicated by black arrows on the trajectory. Right-pointing and left-pointing triangles indicate the timing when neural stimulation applied, respectively.
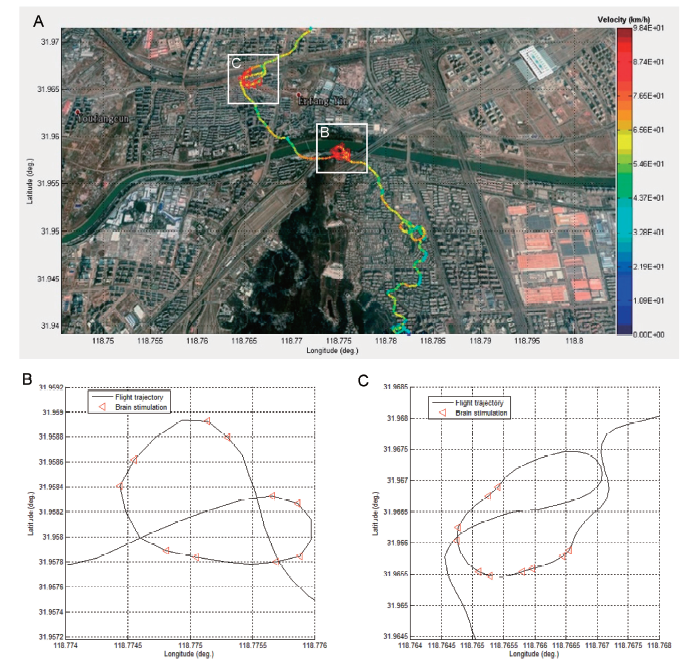 Fig. 5.
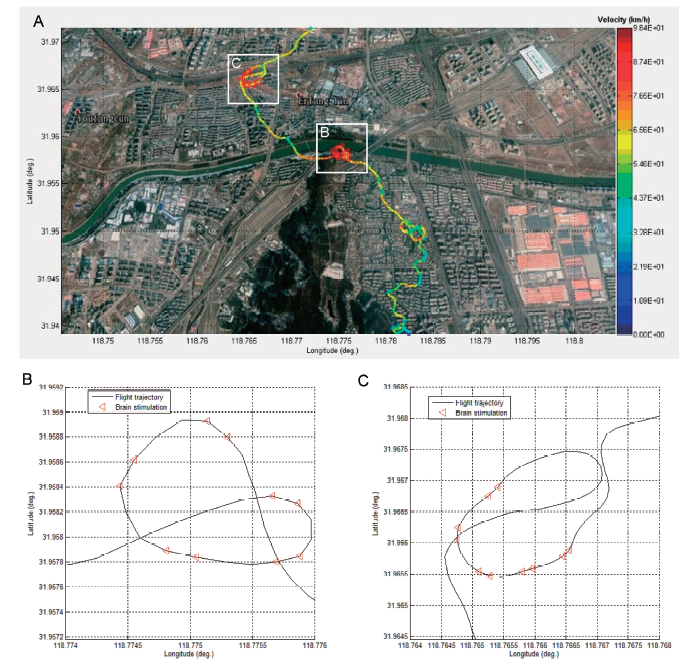
Fig. 5.A. One example of robo-pigeon flight long distance outdoor. The color coded curve is the flight trajectory from south to north, and the color represents the robo-pigeon’s flight speed. The background is the local map referring to Google Map. Two white squares indicate two ROIs, where the multi periodic-stimuli were applied and the orbiting flight was elicited. B. & C. The detail of the flight trajectory in the squares indicated in A.
A long distance outdoor flight control investigation was conducted using two robo-pigeons. The birds were transported to a release site 30 km away from their loft. The release site was familiar to the birds as they had been regularly trained on homing flight twice per week. Two regions of interest (ROI) were selected according to the weekly training flight trajectories of the birds. The control logic was designed such that if the robo-pigeon’s GPS location was detected in the ROI, the multi periodic-stimuli would be applied to the brain stimulation target.
Fig. 3.1 gives an example of the robo-pigeon’s homing flight from the release site 30 km away. It covered from the south of north latitude 31.94
A miniaturized onboard preprogrammed control module for neuromodulation was developed for this study. It was employed to demonstrate controlled flight of robo-pigeons outdoors. The control module was 34 mm
The results demonstrated that, even under natural condition outdoors, it was possible to reliably control a robo-pigeon’s flight and modulate its flight trajectory by electrical stimulation of specified nuclei in the midbrain via a relatively simple interface. This introduces the possibility of many new applications for robo-animals, such as forestry survey, environmental monitoring, and military purposes. Whether a robo-pigeon is competent for certain missions still requires considerable research, especially in field tests for data, which should be a goal of future studies.
L.C. and H.W. conceived and designed the experiments; H.W., J.L., L.C. and C.W. performed the experiments; J.L. and A.S. analyzed the data; J.L. and L.C. contributed reagents and materials; H.W. and L.C. wrote the paper.
This work was funded by NSFC (61375096, 31500858), SRFDP(20133218120038), and YFSAS(2017QN0010).
The authors declare no conflict of interest. The founding sponsors had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, and in the decision to publish the results.